.svg@webp)
Ground Control Points vs. Real Time Kinematic
 Lukas
Zmejevskis
Lukas
Zmejevskis

With aerial photogrammetry, there are two most commonly used types of referencing – GPS metadata in the photos and ground control points in the scene. GPS metadata can come in the level of RTK precision, while ground control points (further GCPs) are always made with survey-grade equipment. In this article, we will find out the fundamental difference between RTK level metadata and GCPs in photogrammetric project referencing. Which is the best for you, and are there differences in inaccuracy? Read further to find out.
What Are Ground Control Points?
Ground control points are points on a scanned object or a surface. A GCP can be anything, either the familiar black and white marker, a spray-painted dot, or any fixed spot. A ground control point must have its precise coordinates measured with survey-grade equipment. The coordinates are saved, and the GCPs are ready to be used.
You can read more about Ground Control Points here.

What Is Real Time Kinematic Metadata?
RTK is a level of GNSS data accuracy far superior to consumer-grade data available for those using non-RTK GPS/GNSS devices. Every smartphone and drone on the market has a simple GPS/GNSS unit. These units are good enough to guide you through a city or mark an approximate location where the image was taken. However, when it comes to photogrammetry, to get a reasonable level of absolute accuracy, we need RTK data. In RTK-equipped drones, such data is embedded into every image that the drone takes when the RTK signal is available. The photogrammetry software later uses this data to use precise camera center positions.
You can read more about RTK drones here.

Ground Control Points vs. Real Time Kinematic Operational Differences
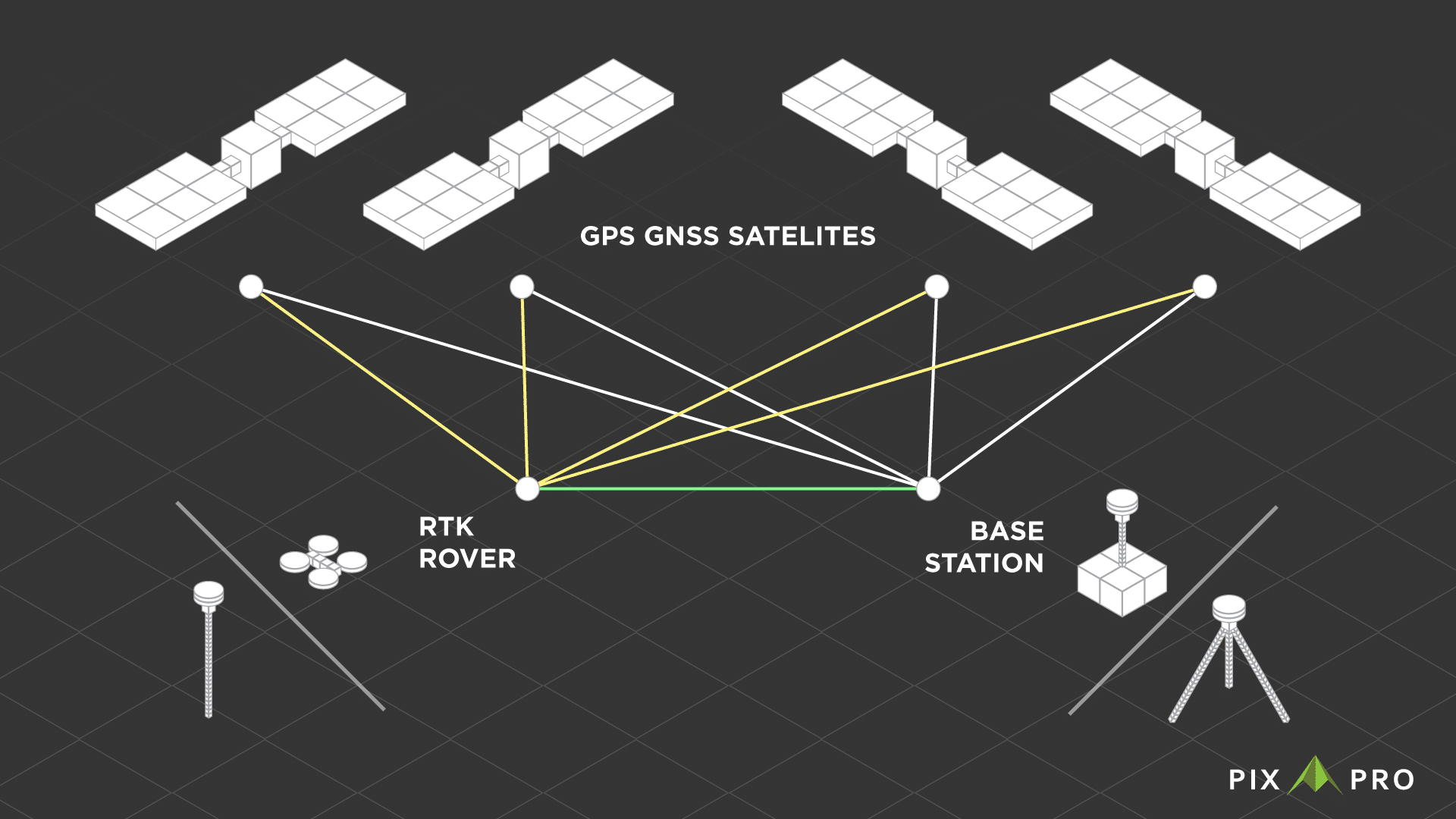
Units inside RTK devices operate in the same manner. The rover (this can be any device that moves, drone included) connects to the base station. Both the rover and the base station are connected to the GNSS satellites. The rover receives corrections from the base station, and its location data becomes precise.
The base station can be either a device that comes with the rover and is not moved the entire time the survey is taking place or a permanent station that rovers can connect with the ability to do so. Many countries have national and commercial base station providers. In our case, we will be using the Lithuanian national RTK provider – LITPOS. Connecting to a permanent base station requires the ability to do so via the internet.
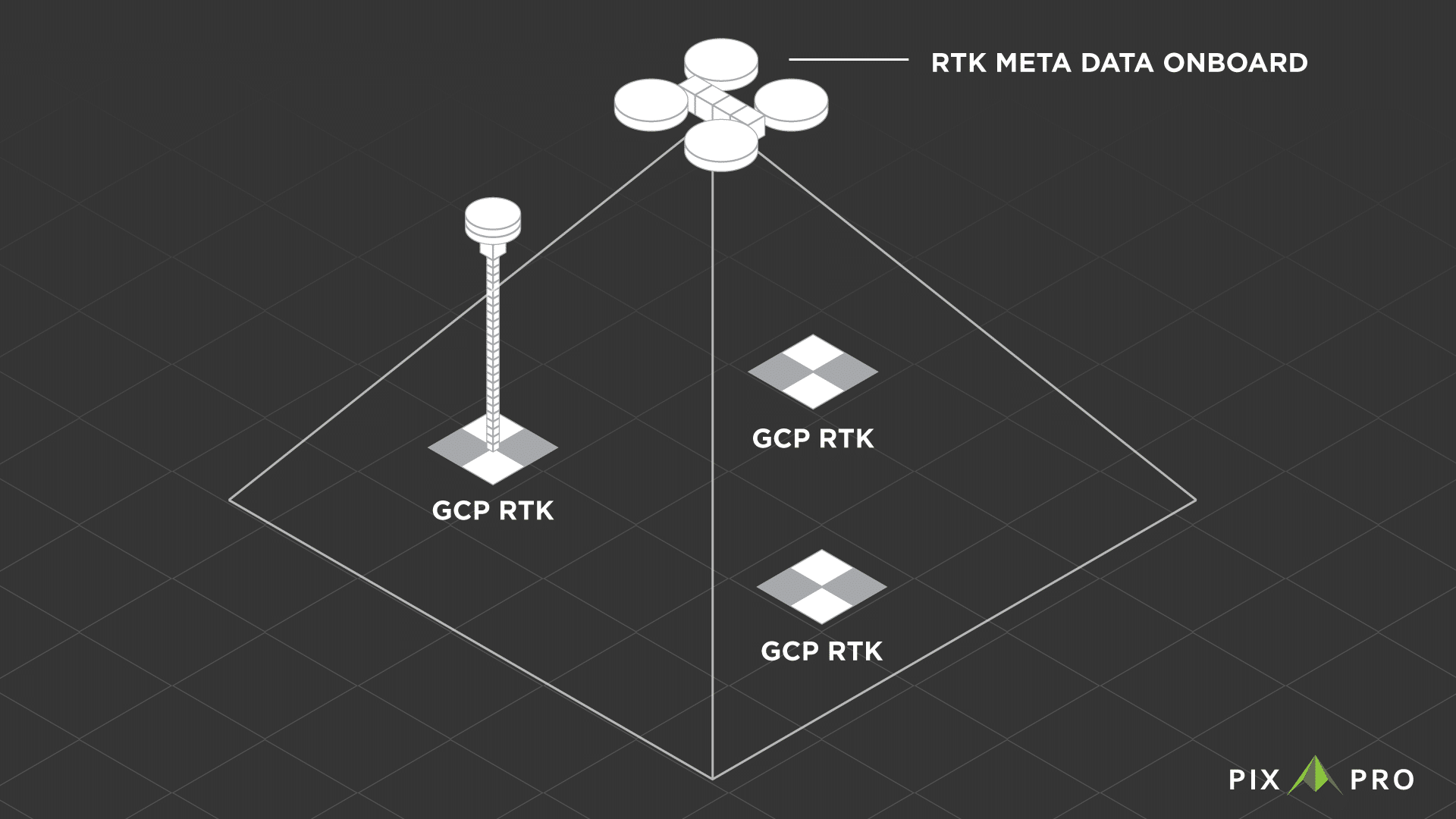
The Fundamental Difference Between GCP and RTK
We arrive at the core difference of using essentially the same technology in different ways. In the case of GCP, the precise location data is in the scene. The RTK drone camera position data is in each photo metadata, which is behind the scene, designating the camera center position. This makes a huge difference in how the precise location data is used during the photogrammetric process. When using only the RTK metadata, we still rely on intrinsic camera values and the camera calibration process for many aspects that determine the accuracy of 3D scenes. While having GCPs, we have accurate points in the scene itself, which help with the camera calibration. When using GCPs in a photogrammetry project, we may need to run other processes. In Pixpro, we call such a process “Reoptimization.”
GCP vs. RTK In the Real World
Time to take a look at some real-world differences. We have measured control points and GCPs in a scene. This scene is scanned with a Phantom 4 RTK and a consumer-grade Phantom 4 Pro drone. Both UAVs have the same camera, but the RTK drone will provide precise camera data, as the name implies. Our scanned subject is a relatively flat stadium, which is problematic when good 3D reconstruction is essential. We have five control points in the middle part of the stadium and four control distances between those points.
Flight Comparison
We tried to keep the two flights as comparable as possible to eliminate as many variables as possible that would otherwise skew the results:
| RTK flight | GPS flight | |
| Drone | Phantom 4 RTK | Phantom 4 Pro |
| Flight planner | DJI RTK planner | Drone Duty |
| Flight height | 38 meters | 38 meters |
| Flight duration | 9 minutes | 9 minutes |
| Designated speed | 3 meter per second | 3 meters per second |
| Acquired photos | 179 | 172 |
| Image resolution and GSD | 20 megapixels, 0.7 cm/pix | 20 megapixels, 0.7 cm/pix |
| Image shutter speed | 1/1000 | 1/1000 |
| White balance, image format | Sunny, JPG | Sunny, JPG |
| ISO and Aperture values | 100 ISO @ f2.8 | 100 ISO @ f2.8 |
Ground Control Point Survey
8 GCPs were acquired using an RTK rover connected to the LITPOS base station system. GCPs are located in the mid-periphery around the track of the stadium. We have not measured additional GCPs in the middle of the stadium to present a scenario where GCPs are not near the area of error measurement. Ideally, such a survey would benefit from having additional 2-3 GCPs in the middle parts of the stadium. The GCP survey took about 15 minutes to complete on the field. GCP workflow in post processing adds further 20 minutes of additional work (with honed skills) in Pixpro as opposed to none needed with RTK metadata imagery.

Absolute Accuracy and Measurements
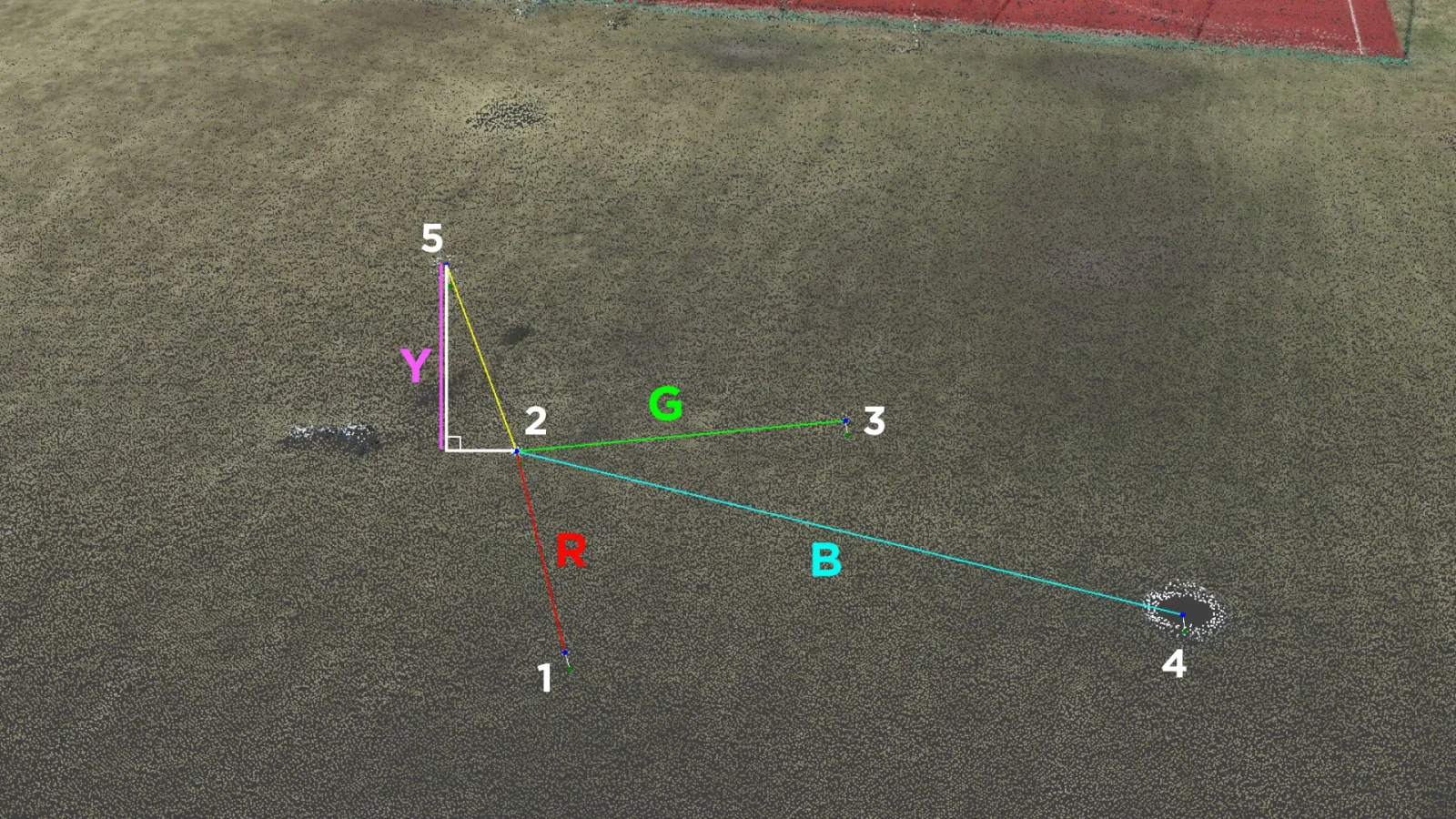
Control points are 5 points that have their precise location measured using an RTK rover in the same manner as ground control points. These points are situated in the middle part of the stadium and are away from GCPs used in the projects referencing. To measure the error, we project these points as ground control points in Pixpro, but we do not use them as reference points. We observe the projection error. Thus we can see how close the computed position of these points is to the measured position: the smaller the distance – the better.

Control point position errors in millimeters:
| Project | Point1 | Point2 | Point3 | Point4 | Point5 |
| GPS only | 108245 | 108212 | 108154 | 108189 | 108188 |
| GPS + GCPs | 237 | 259 | 266 | 260 | 322 |
| RTK only | 399 | 373 | 381 | 383 | 370 |
| RTK + GCPs | 16 | 39 | 42 | 31 | 59 |
The control points were distributed so that distances between them would serve as measurement control. We made sure to precisely measure these distances and then do the same in the Pixpro software. Pixpro allows projection-based measurements where we can project each line and point in the photos, and there is no user error in selecting the points of measurement.
Control distance measurement results in millimeters:
| Project | Distance R | Distance G | Distance B | Distance Y |
| Measured | 5000 | 5000 | 10000 | 2200 |
| GPS only | 4976 | 4977 | 9995 | 2161 |
| GPS + GCPs | 4995 | 4990 | 10019 | 2233 |
| RTK only | 4980 | 4997 | 10025 | 2194 |
| RTK + GCPs | 4984 | 4998 | 10031 | 2207 |
The results show that referencing does not impact the linear measurements in case of good 3D reconstruction results. Remember, we kept everything as consistent and high quality as possible to eliminate all variables but the type of reference. This led to consistent measurement results within a sub 1 percent margin of error.
Meanwhile, the control point position results tell a different story. As expected, the GPS-only project gives us enormous absolute positioning errors. RTK only project improves significantly with sub-400-millimeter errors. The GPS + GCP project gives us a further 40 – 20 percent improvement. Finally, we get errors one magnitude smaller than before when combining GCPs with RTK data.
Conclusion. RTK Metadata or Ground Control Points?
If you find yourself asking which one to use, the answer is as always – it depends. Instead of trying to go over every use case and try to answer for each one, we summarize both systems as the following list of pros and cons:
RTK capable drone:
Pros:
- Stable and precise flight.
- No need to do a GCP survey if the accuracy is within acceptable limits;
- RTK drones are generally capable of PPK to increase accuracy further;
- The whole workflow is considerably faster when GCPs are not used;
- It can be used in conjunction with GCPs with no issues.
Cons:
- The high initial cost of the drone;
- A base station may be necessary, further inflating the price;
- Less accurate than using ground control points overall;
- RTK drones are usually harder to purchase than consumer-grade ones.
Using GCPs:
Pros:
- Better accuracy than using only an RTK drone;
- GCPs can be used in conjunction with a cheaper, more accessible drone;
- GCPs can improve 3D reconstruction results when used with lower-quality cameras.
Cons:
- Professional survey equipment is as expensive as an RTK drone;
- Increases the amount of work in the field and post-processing;
- Cant use GCPs in physically unreachable locations.
- No real benefit over RTK drones unless absolute positional accuracy is required.
It would be best to weigh the pros and cons of your specific use case. Hopefully, now you can make a more educated decision about which is the best for you.
Photographer - Drone Pilot - Photogrammetrist. Years of experience in gathering data for photogrammetry projects, client support and consultations, software testing, and working with development and marketing teams. Feel free to contact me via Pixpro Discord or email (l.zmejevskis@pix-pro.com) if you have any questions about our blog.
Related Blog Posts
Our Related Posts
All of our tools and technologies are designed, modified and updated keeping your needs in mind

No. 1 Mistake You Are Making in Photogrammetry Right Now
As photogrammetry software developers, we need to troubleshoot multiple projects from our clients every week. The number one mistake, especially when making measuring projects, is using redundant photos. These photos can appear for a few reasons, which I will describe, and they can be quickly dealt

Classic Photogrammetry with an iPhone
Photogrammetric 3D scanning can turn a bunch of regular photos into a 3D model or a scene. So, we only need a camera and some knowledge of how to take photos. In the previous article, we tested the latest iPhone camera with a few different apps.

Manual Photography with iPhone 16 Pro Max - Android/Windows User Perspective
Adage as old as touchscreens on portable devices tells us that the best camera is the one you have. We have the luxury of having cameras everywhere we go because we are dependent and addicted to smartphones.
Ready to get started with your project?
You can choose from our three different plans or ask for a custom solution where you can process as many photos as you like!
Free 14-day trial. Cancel any time.