.svg@webp)
Punkty kontrolne na ziemi a RTK
 Lukas
Zmejevskis
Lukas
Zmejevskis

W fotogrametrii lotniczej stosuje się dwa najczęściej używane typy odniesienia – metadane GPS na zdjęciach i punkty kontrolne na ziemi. Metadane GPS mogą posiadać poziom precyzji RTK, podczas gdy punkty kontrolne na ziemi (dalej GCP) są zawsze tworzone za pomocą sprzętu geodezyjnego. W tym artykule dowiemy się, jaka jest fundamentalna różnica między metadanymi na poziomie RTK a GCP w odniesieniu do projektów fotogrametrycznych. Które z nich jest najlepsze dla ciebie i czy istnieją różnice w niedokładnościach? Czytaj dalej, aby się dowiedzieć.
Czym są punkty kontrolne na ziemi?
Punkty kontrolne na ziemi to punkty na zeskanowanym obiekcie lub powierzchni. GCP może być czymkolwiek, zarówno znanym czarno-białym znacznikiem, kropką namalowaną farbą, jak i dowolnym stałym punktem. Punkt kontrolny na ziemi musi mieć zmierzone swoje dokładne współrzędne za pomocą sprzętu geodezyjnego. Współrzędne są zapisywane, a GCP są gotowe do użycia.
Możesz przeczytać więcej o punktach kontrolnych na ziemi w tym artykule.
 Czym są metadane w czasie rzeczywistym kinematycznym?
Czym są metadane w czasie rzeczywistym kinematycznym?
RTK to poziom dokładności danych GNSS znacznie lepszy niż dane dostępne dla konsumentów, dla osób korzystających z urządzeń GPS/GNSS nie wyposażonych w RTK. Każdy smartfon i dron na rynku ma prostą jednostkę GPS/GNSS. Te jednostki są wystarczająco dobre, aby prowadzić cię przez miasto lub oznaczać przybliżoną lokalizację, gdzie zdjęcie zostało zrobione. Jednak, gdy chodzi o fotogrametrię, aby uzyskać rozsądny poziom absolutnej dokładności, potrzebujemy danych RTK. W dronach wyposażonych w RTK, takie dane są osadzone w każdym zdjęciu, które dron robi, gdy sygnał RTK jest dostępny. Oprogramowanie fotogrametryczne używa później tych danych do korzystania z dokładnych pozycji kamery.
Możesz przeczytać więcej o dronach RTK w tym artykule.

Punkty kontrolne na ziemi vs. różnice w czasie rzeczywistym kinematycznym
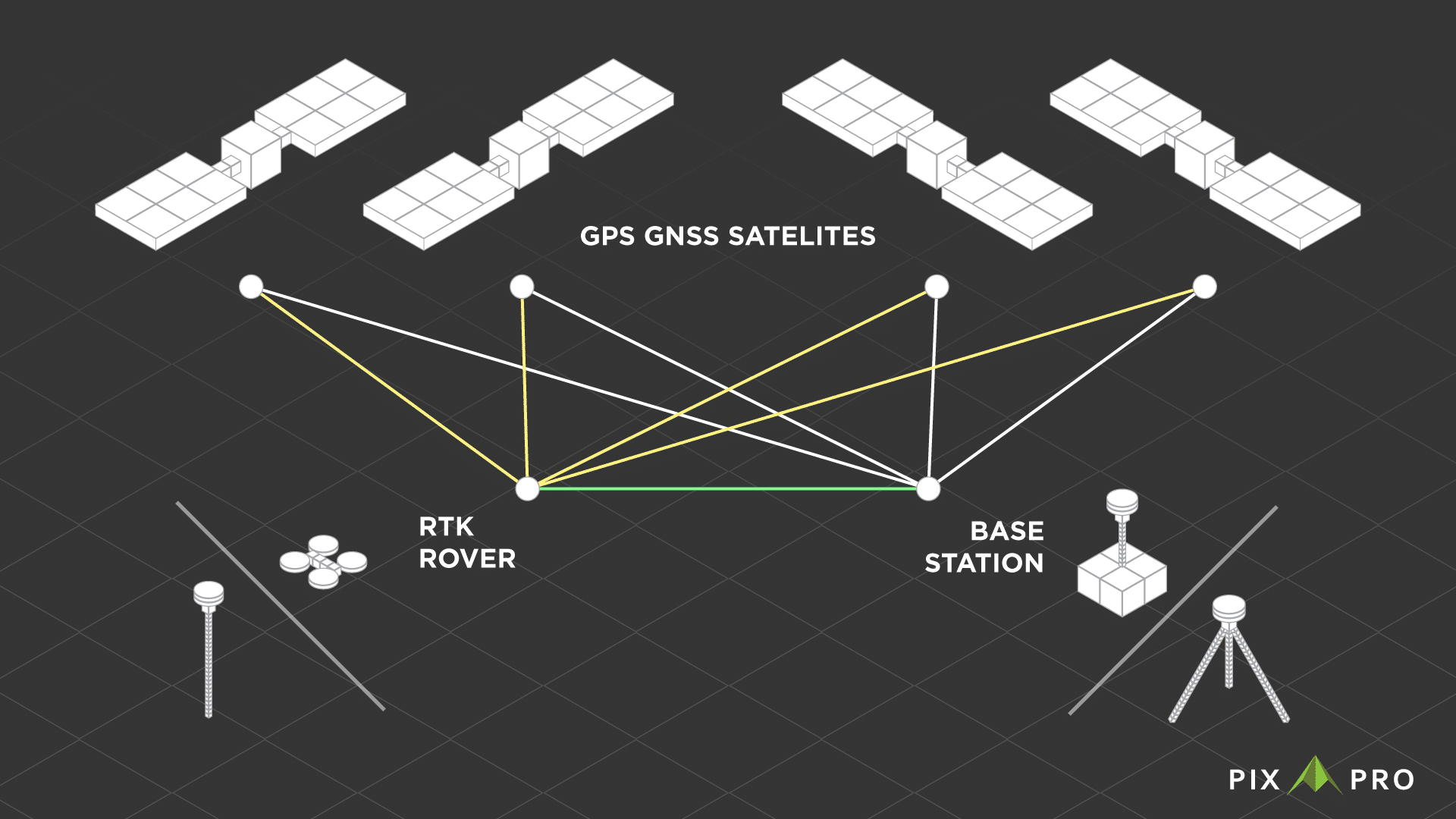
Jednostki w urządzeniach RTK działają w ten sam sposób. Obiekt (może to być dowolne urządzenie, które się porusza, włącznie z dronem) łączy się ze stacją bazową. Zarówno obiekt, jak i stacja bazowa są połączone z satelitami GNSS. Obiekt otrzymuje korekty od stacji bazowej, a jego dane lokalizacyjne stają się dokładne.
Stacja bazowa może być urządzeniem, które przychodzi w zestawie z obiektem i nie jest przemieszczane przez cały czas trwania badania lub stałą stacją, z którą obiekt może się połączyć, mając taką możliwość. Wiele krajów ma krajowych i komercyjnych dostawców stacji bazowych. W naszym przypadku będziemy korzystać z krajowego dostawcy RTK na Litwie – LITPOS. Połączenie ze stałą stacją bazową wymaga możliwości zrobienia tego przez internet.
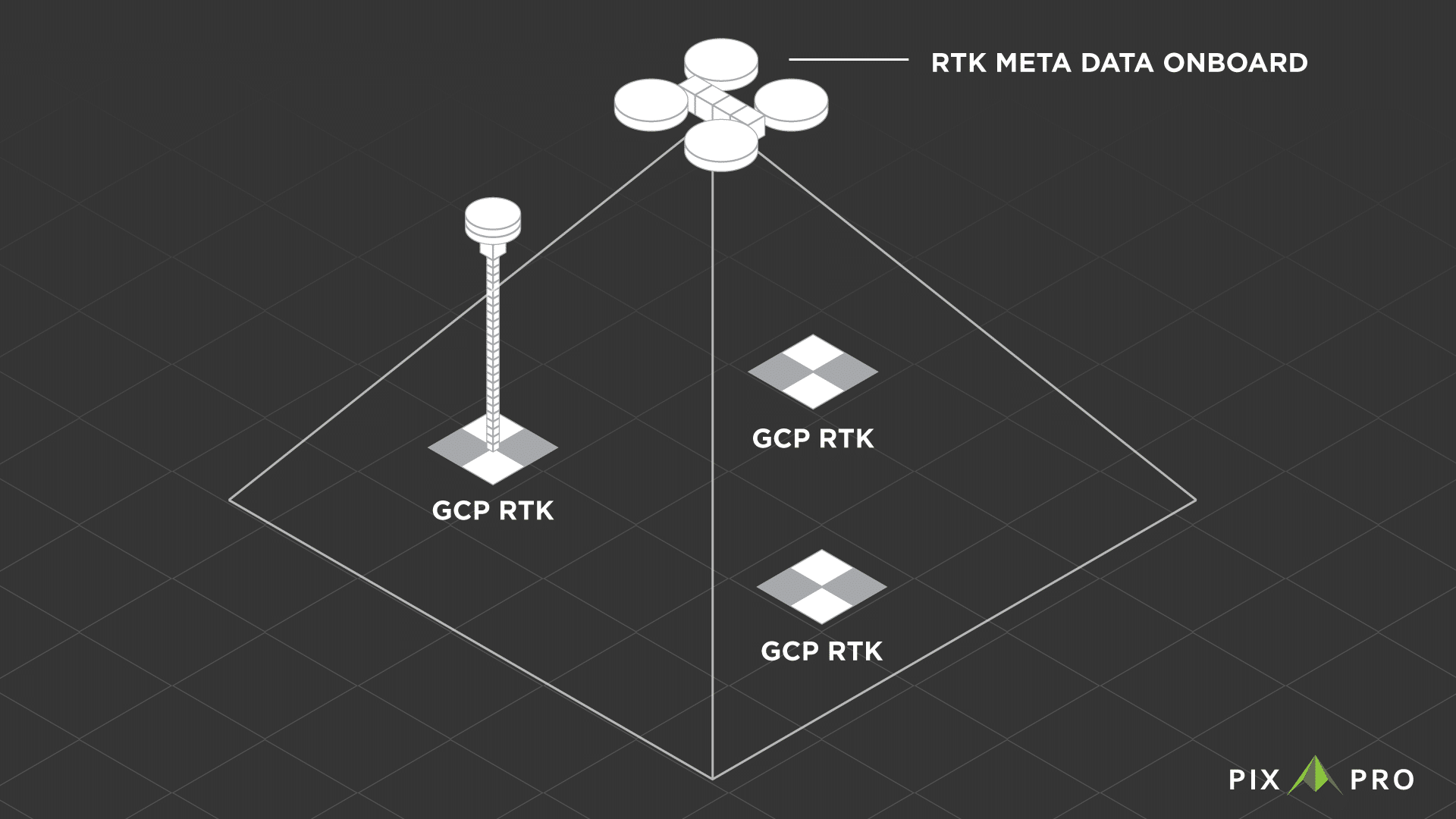
Docieramy do sedna różnicy w używaniu zasadniczo tej samej technologii na różne sposoby. W przypadku GCP dokładne dane lokalizacyjne znajdują się w scenie. Dane pozycji kamery drona RTK znajdują się w metadanych każdego zdjęcia, które jest za sceną, oznaczając pozycję centrum kamery. To robi ogromną różnicę w sposobie używania dokładnych danych lokalizacyjnych podczas procesu fotogrametrycznego. Korzystając tylko z metadanych RTK, nadal polegamy na wewnętrznych wartościach kamery i procesie kalibracji kamery dla wielu aspektów, które określają dokładność scen 3D. Posiadając GCP, mamy dokładne punkty w samej scenie, które pomagają w kalibracji kamery. Przy użyciu GCP w projekcie fotogrametrycznym, możemy potrzebować uruchomić inne procesy. W Pixpro, nazywamy taki proces „Reoptymalizacją”.
GCP vs RTK w rzeczywistym świecie
Czas spojrzeć na niektóre różnice w rzeczywistym świecie. Zmierzyliśmy punkty kontrolne i GCP w scenie. Ta scena została zeskanowana za pomocą drona Phantom 4 RTK i drona konsumenckiego Phantom 4 Pro. Oba UAV mają tę samą kamerę, ale dron RTK zapewni dokładne dane kamery, jak sugeruje nazwa. Naszym zeskanowanym obiektem jest stosunkowo płaski stadion, co jest problematyczne, gdy istotna jest dobra rekonstrukcja 3D. Mamy pięć punktów kontrolnych w środkowej części stadionu i cztery kontrolne odległości między tymi punktami.
Porównanie lotów
Staraliśmy się utrzymać oba loty jak najbardziej porównywalne, aby wyeliminować jak najwięcej zmiennych, które mogłyby w inny sposób zniekształcić wyniki:
|
RTK lot |
GPS lot |
|
|
Dron |
Phantom 4 RTK |
Phantom 4 Pro |
|
Planer lotu |
DJI RTK planer |
Drone Duty |
|
Wysokość lotu |
38 metrów |
38 metrów |
|
Czas trwania lotu |
9 minut |
9 minut |
|
Prędkość wyznaczona |
3 metry na sekundę |
3 metry na sekundę |
|
Zdobyte zdjęcia |
179 |
172 |
|
Rozdzielczość zdjęcia i GSD |
20 megapikseli, 0,7 cm/pix |
20 megapikseli, 0,7 cm/pix |
|
Prędkość migawki zdjęcia |
1/1000 |
1/1000 |
|
Balans bieli, format zdjęcia |
Słoneczny, JPG |
Słoneczny, JPG |
|
Wartości ISO i przysłony |
100 ISO przy f2.8 |
100 ISO przy f2.8 |
Badanie punktu kontrolnego na ziemi
Za pomocą drona RTK połączonego z systemem stacji bazowej LITPOS, uzyskano 8 GCP. GCP są umieszczone w środkowo-peryferyjnej części wokół toru stadionu. Nie zmierzyliśmy dodatkowych GCP w środkowej części stadionu, aby przedstawić scenariusz, w którym GCP nie znajdują się w pobliżu obszaru pomiaru błędu. Idealnie, takie badanie skorzystałoby z posiadania dodatkowych 2-3 GCP w środkowych częściach stadionu. Badanie GCP zajęło około 15 minut na polu. Przepływ pracy GCP w postprocessingu dodaje dalsze 20 minut dodatkowej pracy (przy wyćwiczonych umiejętnościach) w Pixpro, w przeciwieństwie do braku potrzeby przy metadanych RTK.
 Absolutna dokładność i pomiary
Absolutna dokładność i pomiary
Punkty kontrolne to 5 punktów, które mają zmierzoną dokładną lokalizację w ten sam sposób co punkty kontrolne na ziemi. Te punkty znajdują się w środkowej części stadionu i są oddalone od GCP używanych w projektach odniesienia. Aby zmierzyć błąd, projektujemy te punkty jako punkty kontrolne na ziemi w Pixpro, ale nie używamy ich jako punktów odniesienia. Obserwujemy błąd projekcji. Dzięki temu możemy zobaczyć, jak blisko obliczona pozycja tych punktów jest do zmierzonej pozycji: im mniejsza odległość – tym lepiej.
 Błędy pozycji punktów kontrolnych w milimetrach:
Błędy pozycji punktów kontrolnych w milimetrach:
| Project | Point1 | Point2 | Point3 | Point4 | Point5 |
| GPS only | 108245 | 108212 | 108154 | 108189 | 108188 |
| GPS + GCPs | 237 | 259 | 266 | 260 | 322 |
| RTK only | 399 | 373 | 381 | 383 | 370 |
| RTK + GCPs | 16 | 39 | 42 | 31 | 59 |
Punkty kontrolne zostały rozmieszczone tak, aby odległości między nimi służyły jako kontrola pomiaru. Upewniliśmy się, aby dokładnie zmierzyć te odległości, a następnie zrobić to samo w oprogramowaniu Pixpro. Pixpro pozwala na pomiary oparte na projekcji, gdzie możemy wyświetlić każdą linię i punkt na zdjęciach, i nie ma błędu użytkownika przy wyborze punktów pomiaru.
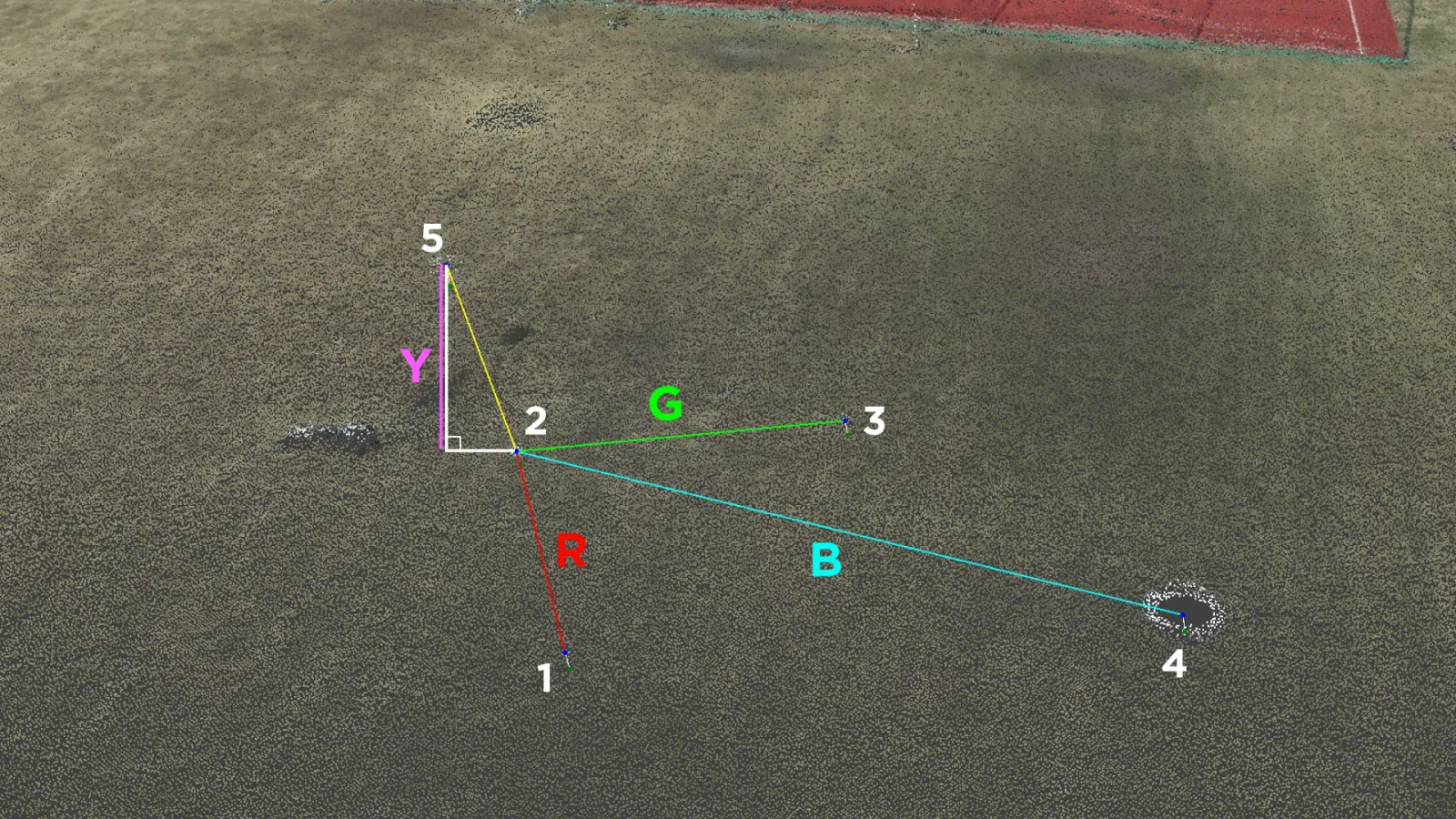
Wyniki pomiarów odległości kontrolnych w milimetrach:
| Project | Distance R | Distance G | Distance B | Distance Y |
| Zmierzone | 5000 | 5000 | 10000 | 2200 |
| GPS only | 4976 | 4977 | 9995 | 2161 |
| GPS + GCPs | 4995 | 4990 | 10019 | 2233 |
| RTK only | 4980 | 4997 | 10025 | 2194 |
| RTK + GCPs | 4984 | 4998 | 10031 | 2207 |
Wyniki pokazują, że odniesienie nie wpływa na liniowe pomiary w przypadku dobrych wyników rekonstrukcji 3D. Pamiętaj, utrzymywaliśmy wszystko tak spójnie i wysokiej jakości, jak to możliwe, aby wyeliminować wszystkie zmienne oprócz typu odniesienia. To doprowadziło do spójnych wyników pomiarów w granicach błędu poniżej 1 procenta.
Tymczasem wyniki pozycji punktów kontrolnych opowiadają inną historię. Jak można się było spodziewać, projekt tylko z GPS daje nam ogromne błędy absolutnego pozycjonowania. Projekt tylko z RTK znacząco się poprawia z błędami poniżej 400 milimetrów. Projekt GPS + GCP daje nam dalszą poprawę o 40 – 20 procent. W końcu, kiedy łączymy GCP z danymi RTK, otrzymujemy błędy o rząd wielkości mniejsze niż wcześniej.
Wniosek. Metadane RTK czy punkty kontrolne na ziemi?
Jeśli zastanawiasz się, które z nich użyć, odpowiedź jest jak zawsze – to zależy. Zamiast próbować omówić każdy przypadek użycia i odpowiedzieć na każdy z nich, podsumowujemy oba systemy jako następującą listę zalet i wad:
Dron zdolny do RTK:
Zalety:
- Stabilny i precyzyjny lot.
- Nie ma potrzeby przeprowadzania badania GCP, jeśli dokładność mieści się w akceptowalnych granicach;
- Drony RTK są ogólnie zdolne do PPK, aby jeszcze bardziej zwiększyć dokładność;
- Cały przepływ pracy jest znacznie szybszy, gdy GCP nie są używane;
- Może być używany wspólnie z GCP bez problemów.
Wady:
- Wysoki początkowy koszt drona;
- Może być konieczna stacja bazowa, co jeszcze bardziej zwiększa cenę;
- Mniej dokładne niż używanie punktów kontrolnych na ziemi;
- Drony RTK są zwykle trudniejsze do zakupu niż te konsumenckie.
Używanie GCP:
Zalety:
- Lepsza dokładność niż przy użyciu tylko drona RTK;
- GCP mogą być używane wspólnie z tańszym, łatwiej dostępnym dronem;
- GCP mogą poprawić wyniki rekonstrukcji 3D, gdy są używane z kamerami niższej jakości.
Wady:
- Profesjonalny sprzęt geodezyjny jest równie drogi jak dron RTK;
- Zwiększa ilość pracy w terenie i w postprocessingu;
- Nie można używać GCP w fizycznie nieosiągalnych lokalizacjach.
- Brak rzeczywistych korzyści nad dronami RTK, chyba że wymagana jest absolutna dokładność pozycyjna.
Należy rozważyć zalety i wady w kontekście swojego konkretnego przypadku użycia. Mamy nadzieję, że teraz możesz podjąć bardziej świadomą decyzję, która z opcji jest najlepsza dla ciebie.
Photographer - Drone Pilot - Photogrammetrist. Years of experience in gathering data for photogrammetry projects, client support and consultations, software testing, and working with development and marketing teams. Feel free to contact me via Pixpro Discord or email (l.zmejevskis@pix-pro.com) if you have any questions about our blog.
Powiązane posty na blogu
Nasze powiązane posty
Wszystkie nasze narzędzia i technologie są zaprojektowane, modyfikowane i aktualizowane z myślą o twoich potrzebach

Pixpro Waypoints - Automatyczne loty fotogrametryczne dla najnowszych dronów DJI
Najnowsze drony DJI to najbardziej zdolne latające kamery na rynku. Jeśli potrzebujesz takiego narzędzia lub kompetentnej maszyny do przypadkowej kreacji - DJI Mavic 3, DJI Mini 4 i drony z serii DJI Air 3 są najlepsze.

Najlepszy procesor graficzny dla fotogrametrii - OpenCL vs. CUDA
Tworzenie projektu fotogrametrii to ciężkie zadanie dla każdego komputera. Setki tysięcy zdjęć muszą być przetworzone przez dziesiątki algorytmów przetwarzających gigabajty danych w czasie rzeczywistym.

Drony z modułem RTK: Co powinieneś wiedzieć
Drony z modułami RTK używane do mapowania za pomocą dronów zapewniają dokładność GPS i rzędy wielkości lepszą niż jednostki GPS klasy konsumenckiej. Sprawia to, że drony z modułami RTK stanowią rozwiązanie do mapowania i skanowania 3D, gdzie precyzja jest kluczowa dla zastosowań w realnym świecie.
Gotowy, aby rozpocząć swój projekt?
Możesz wybrać spośród naszych trzech różnych planów lub poprosić o niestandardowe rozwiązanie, gdzie możesz przetwarzać tyle zdjęć, ile chcesz!
Bezpłatna 14-dniowa wersja próbna. Anuluj w dowolnym momencie.