.svg@webp)
Autel Evo 2 Pro for Photogrammetry
 Lukas Zmejevskis
Lukas Zmejevskis

The previous article reviewed the Autel Evo 2 Pro from a more general perspective. Purposely we left out the photogrammetry part so we could give a more detailed explanation of that topic in a dedicated article. Because the Evo 2 remote controller comes with an Autel app capable of automatic flights, it is one of the more affordable options with integrated flight planning. We do not call the Evo 2 Pro a specialist photogrammetry tool as it lacks RTK GPS from the more expensive RTK versions of the same drone. But it is a middle-of-the-road solution and a compelling option for those who use GCPs for professional surveys or need good photogrammetric scans without absolute positioning accuracy.

Autel Evo 2 Pro Flight Plans
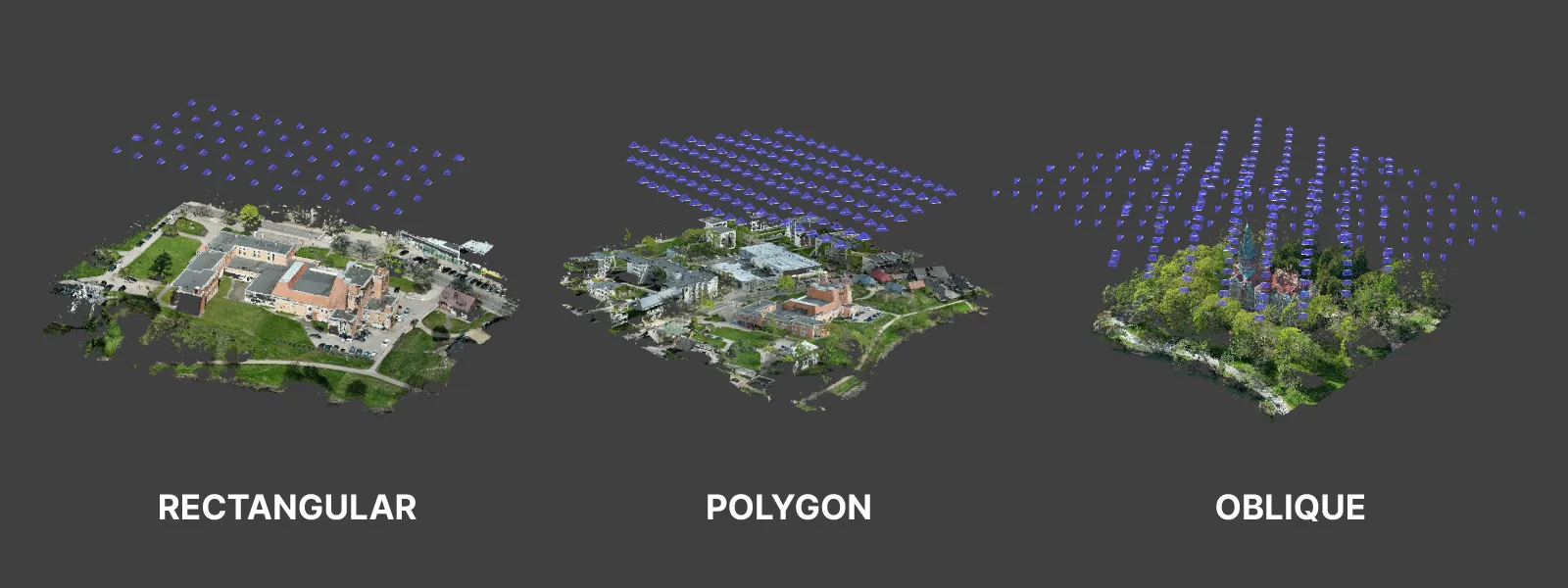
The mission part of the Autel app has a few different types of flights:
Waypoint: a standard waypoint flight where you can designate a flight path and camera capture. Rectangular: rectangular-shaped area designation for a grid flight with standard overlap, camera angle, and speed settings. Polygon: same as rectangular, but the area designation can be any polygon, in essence, a more flexible grid flight version. Oblique: a multi-grid flight with all five orientations for a designated polygonal area and automatic flight offset. Recording: flight path recording mode, when a manual flight is recorded and saved as a mission.
The mission part of the app also displays previously executed mission history even without specifically saving each mission. We can repeat a task any number of times or remove it.
One specific flight plan that is missing is the orbital flight. The previous article mentioned that orbital intelligent flight modes available with the Autel app have limitations. Those limitations mean we can not take full-resolution uncropped photos, limiting their usability for photogrammetry. One mode with some usability is the orbital hyperlapse mode, which takes cropped 16:9 images, even in raw format. These photos are saved in raw format and are usable for photogrammetry. You can master this mode to maintain overlap and coverage during photo capture. In that case, you can do small-scale orbital missions without any issues.

However, the orbital flight meant for hyperlapse did not do well in maintaining a good center point when orbiting a roof - the most common application for such a mode. After dozens of attempts of using the tracking box, where you need to draw a box around your subject, trying to select the optimal spot, the drone drifted away and lost the center point. It did not lose the point entirely, but it did not make a neat orbit around the selected subject. Still, we took the photos and processed them.
Mission Flight Experience
The overall automatic mission flight experience was good. We tested polygon and oblique mission types a few times, and each time, it went smoothly. All essential settings are available for the missions to achieve the best results. Overlap control, speed control, and full camera controls are easily reachable. Whichever exposure mode you select while monitoring the mission, it will be used when capturing photos, and it can be changed or adjusted on the fly.
Additionally, raw and jpeg photos with custom picture styles are captured without issues if you are within reasonable speeds. If the flight speed is too high and the capture is too quick, the buffer of the drone will not keep up. If you are shooting raw+jpeg, at least 5 seconds should pass between consecutive shots; if you are shooting jpeg, only - 2 seconds is enough.
Most of the qualms we had with the manual flight experience do not apply here because you do not feel sluggish performance. Only if you are using the sticks do you notice the slow speed and high inertia, but when an automatic flight is in progress - none of that bothers the pilot—what is still bothersome - is the mediocre flight time and remote controller operation time.
An odd behavior we encountered was the automatic and forced plan stoppage when the battery reached the 20 percent mark. During an oblique flight, the drone was close to home and would have finished the last few photos even below the low battery threshold. Instead, the app forcefully ended the plan and initiated the RTH function.
Luckily the plan continuity after a battery is changed works quite seamlessly. After powering up the drone, it automatically prompted that a plan was still in progress and asked if we wanted to resume it. After continuing the task, the drone took off and completed the mission from where it left off.
Overall, we did not find any technical issues with the plans; overlap was up to spec, and speed remained consistent as set by the pilot. The drone creates a separate folder for each flight which is good, and the time estimation for each flight was reasonably accurate. There were no issues with the live feed or the connection with the remote control; no photos were missing after the plans were complete. Positive experience overall.
Photogrammetry Examples

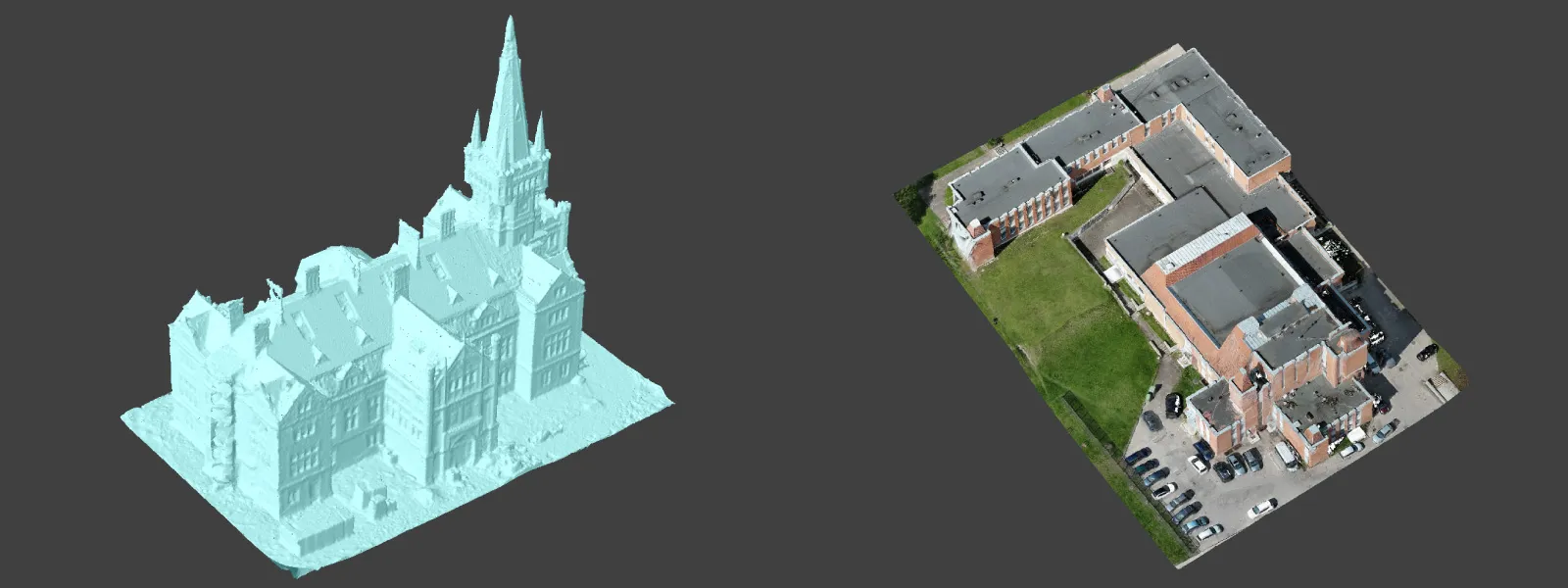
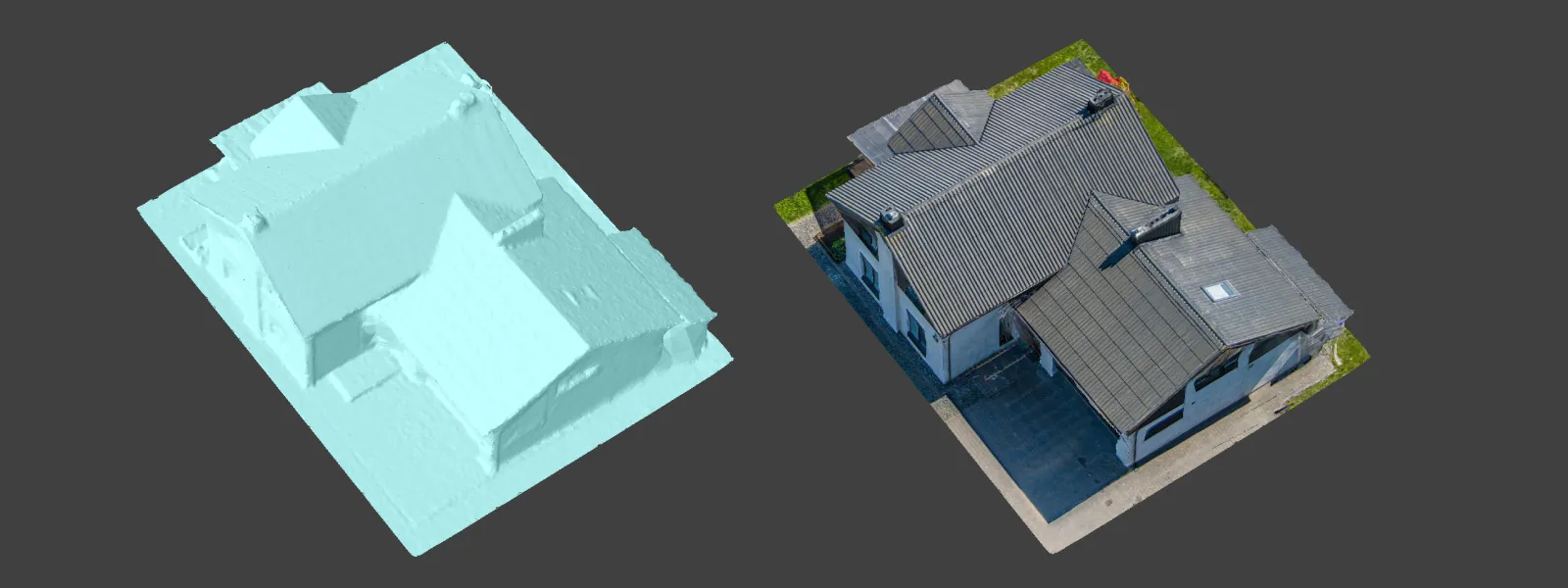
During our testing, we created a few examples of scans representing common photogrammetry use cases. First, a couple of surveys for orthophoto creation. Two nadir scans, roughly the same position but different scale and resolution. All examples were processed with Pixpro using jpegs from the drone.

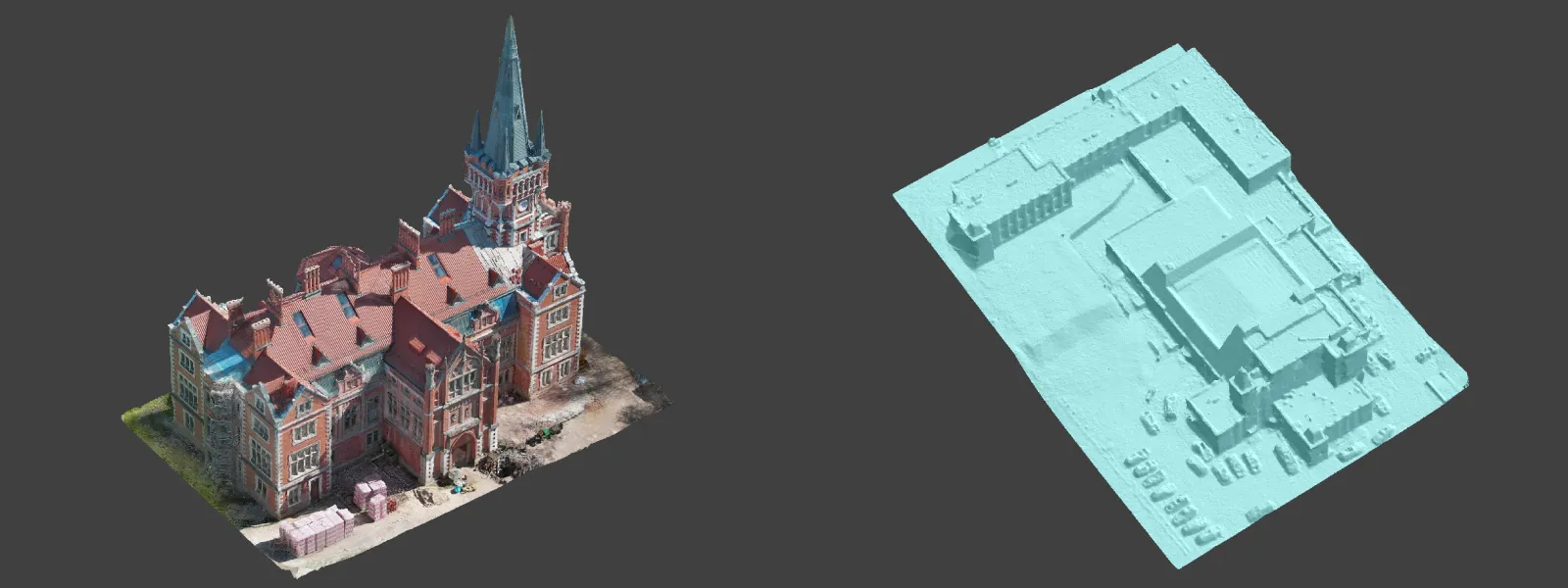
We also made a couple of oblique scans, representing the most detailed possible traditional automatic flight, which allows the creation of a good quality 3D model of the scene. If you need more detail, reduce the distance to the subject (flight altitude) or employ custom/manual photogrammetric scanning.
Lastly, we tried using the orbital hyperlapse for photogrammetry; despite the unstable orbital center and cropped photos, this data is suitable for photogrammetry if all other factors are under control. Work around the crop and maintain overlap; you will have no issues reconstructing similar image sets. The Hyperlapse video that the drone creates is just a neat bonus.
Elephant in the Room
So far, we have ignored one aspect of the Autel drones mentioned often in real-world discussions and their marketing material - no flight restriction zones. There are legitimate situations where this feature, or rather lack thereof, might help to fly perfectly legally without the hassle or inconvenience of zone unlocking. However, no-flight zones exist for a reason, and everyone should follow drone piloting laws. It is a matter of time before drone regulation will catch up, and drones without restrictions will be barred from purchase. As additional information, Autel Robotics is under ownership by Autel Intelligent Technology Company, a Chinese company making all of its products in China.
Conclusion
Autel Evo 2 Pro is a much more compelling package for photogrammetry than a good drone for general use. Its closest price competitor - the Mavic 3 Classic, offers better video and photos but lacks flight planning features beyond waypoints and tracks. Meanwhile, the Autel Eco 2 Pro has the classic photogrammetry options such as single grid and oblique multi grids and, with some workarounds, can do orbital stuff. The SDK is also freely available for third-party app development. If your main focus is photography, hyperlapse, and photogrammetry with equal priorities - this drone is an excellent option for the price.
Photographer - Drone Pilot - Photogrammetrist. Years of experience in gathering data for photogrammetry projects, client support and consultations, software testing, and working with development and marketing teams. Feel free to contact me via Pixpro Discord or email (l.zmejevskis@pix-pro.com) if you have any questions about our blog.
Related Blog Posts
Our Related Posts
All of our tools and technologies are designed, modified and updated keeping your needs in mind

DJI Drone Settings and Features - DJI Fly App Extensive Guide Part 1
The best flying cameras on the market today are DJI drones. They are the best tools for video, photo or 3D photogrammetry scan creation. However, the tool is only as capable as the user.

Building a PC - Tips and Hardware for mid-2024
A year has passed since our last article about building a workstation PC, so it is time to revisit the market to see what has changed.

Pixpro Waypoints v2 - Orbitals and Height Offset for DJI Drones
Pixpro Waypoints is a service for consumer DJI drone users that provides consistent and automated flying for aerial photogrammetry purposes. For now, we had the essential single grid flight only, which is the bread and butter for making orthophoto images and terrain scans.
Ready to get started with your project?
You can choose from our three different plans or ask for a custom solution where you can process as many photos as you like!
Free 14-day trial. Cancel any time.
Welcome to Pixpro
Sign in
And access your account.